 |
 |
|||||||||||||
 |
||||||||||||||
 |
||||||||||||||
Project Sweet Tooth
Project Robot
I have done some work with Lego Mindstorms for my elective ELE 491 class. The main idea of the project was to create an artificial intelligent robot that will locate a target object and bring it to the home base. The coordinate of the target object and the robot are sent to the robot using a program created using MATLAB and a webcam. The robot has to calculate the given data and try to locate the target.
This is the link for some of the pictures of the project robot.Project Robot's Pictures
Pic1 Pic2 Pic3 Pic4 Pic5
First Sweet Tooth
While I was in the ELE 491 class I was also able to make some other cool robots using Lego. When I first started building robots I wasn’t interested in making a regular robot that would drive on two or four tires. I found those things boring and wanted to create something different, so I thought of making robots that would walk just like animals or humans. This became the theme of my robots and I started working on it.This is the link to my first robot I have ever created using Lego Mindstorms.
First Sweet Tooth’s Pictures
Pic1 Pic2 Pic3 Pic4 Pic5
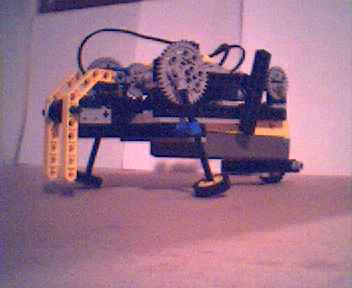
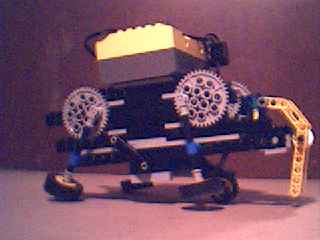
Second Sweet Tooth
The second robot is an upgrade to the first one. This one has four legs and has synchronized walking action so that it will lift up front left leg and back right leg at the same time followed by the back left leg and front right leg. Basically it would walk like a dog or and elephant or any other four legged animal. The front two yellow pieces are actually touch sensors, when touched the robot will turn back and walk around the obstacle. This is also how the robots get their name “Sweet Tooth”.Second Sweet Tooth’s Pictures
Pic1 Pic2 Pic3 Pic4 Pic5 Pic6
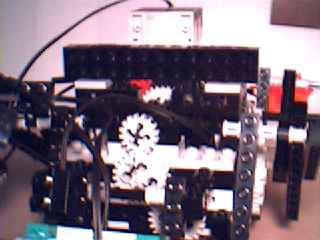
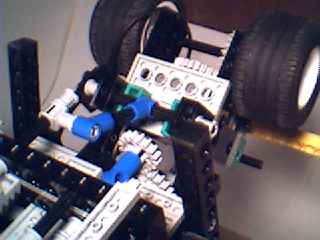
Third Sweet Tooth (My Favorite)
This robot is one of a kind. It has capability to walk (on six legs) and drive (on three tires). The idea came to me from a robot cartoon called “Transformers”. In other words it can transform from a six-legged creator to a three-wheeled motorcycle. It took me a while to figure out a way to make it work, but after a few tries I was able to pull it together. I had to use a special gear called a “worm gear” to pull and push the extended tires on the front and the back. This would literally lift up the entire robot and just let it ride on the tires. And when it needs to “transform” into a six-legged creator it would simply push the tires up and start walking. Unfortunately I wasn’t able to take any movies for this robot. But hopefully the pictures help you get a better idea.Third Sweet Tooth’s Pictures
Pic1 Pic2 Pic3 Pic4 Pic5 Pic6 Pic7 Pic8 Pic9 Pic10 Pic11 Pic12 Pic13 Pic14 Pic15
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |
 |
||
| Home • Hobbies • About Me • Contact Info |